Note
Go to the end to download the full example code
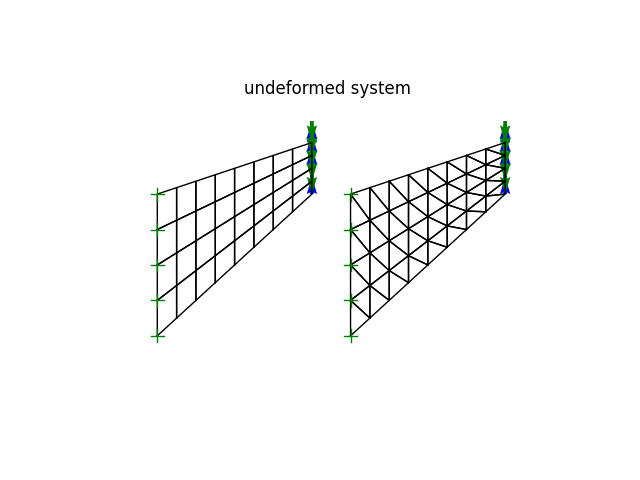
Benchmark problem: Wedged Plate
Using PatchMesher to model the plate
import math
import sys
import numpy as np
from femedu.examples import Example
from femedu.domain import System, Node
from femedu.solver import NewtonRaphsonSolver
#from femedu.elements.linear import Quad, Triangle
from femedu.elements.finite import Quad, Triangle
from femedu.materials import PlaneStress
from femedu.mesher import *
class ExampleBenchmark01(Example):
def problem(self):
# ========== setting mesh parameters ==============
Nx = 8 # number of elements in the mesh
Ny = 4 # number of elements in the mesh
L1 = 48.0
L2 = 44.0
L3 = 16.0
# ========== setting material parameters ==============
params = dict(
E = 1000., # Young's modulus
nu = 0.3, # Poisson's ratio
t = 1.00 # thickness of the plate
)
# ========== setting load parameters ==============
px = 0.0 # uniform load normal to x=Lx
py = 0.0 # uniform load normal to y=Ly
pxy = 100.0/L3 # uniform shear load on x=L1
# ========== setting analysis parameters ==============
target_load_level = 5.00 # reference load
max_steps = 26 # number of load steps: 2 -> [0.0, 1.0]
# define a list of target load levels
load_levels = np.linspace(0, target_load_level, max_steps)
#
# ==== Build the system model ====
#
model = System()
model.setSolver(NewtonRaphsonSolver())
# create nodes
mesher = PatchMesher(model, (0.,0.),(L1, L2),(L1, L2+L3),(0.,L2) )
nodes, elements = mesher.quadMesh(Nx, Ny, Quad, PlaneStress(params))
mesher.shift(1.25*L1, 0.0)
nodes2, elements2 = mesher.triangleMesh(Nx, Ny, Triangle, PlaneStress(params))
nodes += nodes2
elements += elements2
# ==== Apply boundary conditions ====
#
# the left model
#
Xo = np.array([L1, 0.0])
No = np.array([1.0, 0.0])
for node in nodes:
X = node.getPos()
# define support(s) ...
if math.isclose(X[0], 0.0):
node.fixDOF('ux','uy') # fix left side
# define loads ...
if math.isclose(X[0],L1):
# locate the node at the centerline
if math.isclose(X[1],L2+L3):
nodeA = node
# load the end faces
for elem in node.elements:
for face in elem.faces:
for x, area in zip(face.pos, face.area):
if np.abs( (x - Xo) @ No ) < 1.0e-2 and No @ area / np.linalg.norm(area):
face.setLoad(px, pxy)
#
# the right model
#
Xo = np.array([2.25*L1, 0.0])
No = np.array([1.0, 0.0])
for node in nodes:
X = node.getPos()
# define support(s) ...
if math.isclose(X[0], 1.25*L1):
node.fixDOF('ux','uy') # fix left side
# define loads ...
X = node.getPos()
if math.isclose(X[0],2.25*L1):
# locate the node at the centerline
if math.isclose(X[1],L2+L3):
nodeB = node
# load the end faces
for elem in node.elements:
for face in elem.faces:
for x, area in zip(face.pos, face.area):
if np.abs( (x - Xo) @ No ) < 1.0e-2 and No @ area / np.linalg.norm(area):
face.setLoad(px, pxy)
#model.report()
# set up a recorder
model.initRecorder(variables=['ux','uy'], nodes=[nodeA, nodeB])
model.startRecorder()
model.plot(factor=0, title="undeformed system", filename="benchmark01_undeformed.png", show_bc=1, show_loads=1)
for lf in np.linspace(0.0, target_load_level, max_steps):
model.setLoadFactor(lf)
model.solve(verbose=True)
#model.report()
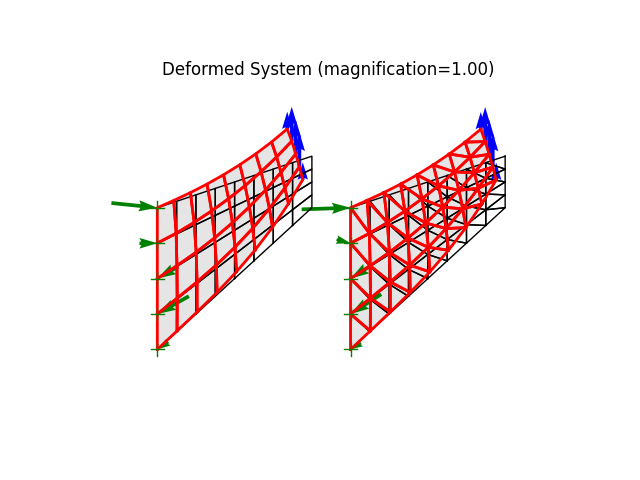
model.plot(factor=1., filename=f"benchmark01_deformed_lf{lf:.2f}.png", show_bc=1, show_loads=1, show_reactions=1)
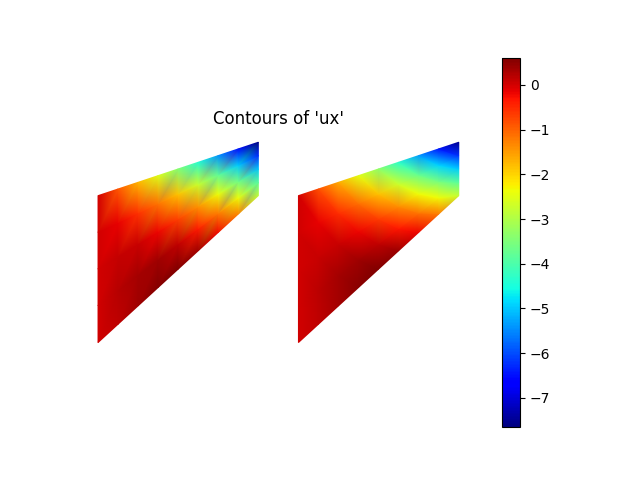
model.valuePlot('ux', filename=f"benchmark01_ux_lf{lf:.2f}.png")
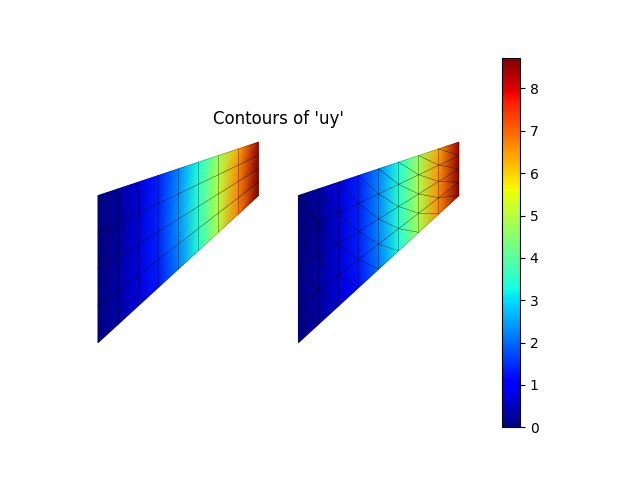
model.valuePlot('uy', show_mesh=True, filename=f"benchmark01_uy_lf{lf:.2f}.png")
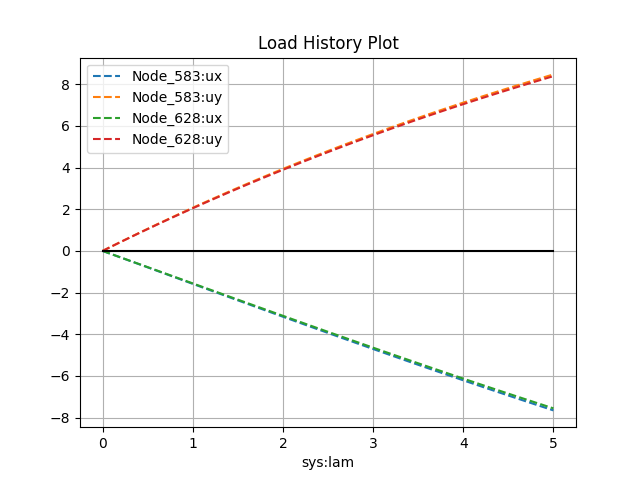
# create a history plot for the end node
#model.historyPlot('lam', ['ux','uy'], nodes=[nodeA,nodeA])
#model.historyPlot('lam', ['ux','uy'], nodes=[nodeB,nodeB])
model.historyPlot('lam', ['ux','uy','ux','uy'], nodes=[nodeA,nodeA,nodeB,nodeB])
Run the example by creating an instance of the problem and executing it by calling Example.run()
if __name__ == "__main__":
ex = ExampleBenchmark01()
ex.run()
norm of the out-of-balance force: 2.7688e-11
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.7967e+00
norm of the out-of-balance force: 8.7339e-04
norm of the out-of-balance force: 1.3845e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.6992e+00
norm of the out-of-balance force: 8.4504e-04
norm of the out-of-balance force: 1.3397e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.6018e+00
norm of the out-of-balance force: 8.1663e-04
norm of the out-of-balance force: 1.3143e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.5050e+00
norm of the out-of-balance force: 7.8823e-04
norm of the out-of-balance force: 1.2404e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.4088e+00
norm of the out-of-balance force: 7.5995e-04
norm of the out-of-balance force: 1.1627e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.3136e+00
norm of the out-of-balance force: 7.3186e-04
norm of the out-of-balance force: 1.0961e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.2193e+00
norm of the out-of-balance force: 7.0406e-04
norm of the out-of-balance force: 1.0283e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.1263e+00
norm of the out-of-balance force: 6.7662e-04
norm of the out-of-balance force: 9.7111e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.0346e+00
norm of the out-of-balance force: 6.4960e-04
norm of the out-of-balance force: 9.1305e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.9445e+00
norm of the out-of-balance force: 6.2307e-04
norm of the out-of-balance force: 8.3466e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.8559e+00
norm of the out-of-balance force: 5.9709e-04
norm of the out-of-balance force: 7.7834e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.7691e+00
norm of the out-of-balance force: 5.7170e-04
norm of the out-of-balance force: 7.1267e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.6841e+00
norm of the out-of-balance force: 5.4694e-04
norm of the out-of-balance force: 6.4320e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.6009e+00
norm of the out-of-balance force: 5.2286e-04
norm of the out-of-balance force: 6.0587e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.5197e+00
norm of the out-of-balance force: 4.9947e-04
norm of the out-of-balance force: 5.6366e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.4404e+00
norm of the out-of-balance force: 4.7681e-04
norm of the out-of-balance force: 4.9495e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.3631e+00
norm of the out-of-balance force: 4.5488e-04
norm of the out-of-balance force: 4.8066e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.2879e+00
norm of the out-of-balance force: 4.3371e-04
norm of the out-of-balance force: 4.3637e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.2147e+00
norm of the out-of-balance force: 4.1330e-04
norm of the out-of-balance force: 3.7956e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.1436e+00
norm of the out-of-balance force: 3.9364e-04
norm of the out-of-balance force: 3.3426e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.0745e+00
norm of the out-of-balance force: 3.7475e-04
norm of the out-of-balance force: 3.2578e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.0075e+00
norm of the out-of-balance force: 3.5661e-04
norm of the out-of-balance force: 2.8513e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.9426e+00
norm of the out-of-balance force: 3.3921e-04
norm of the out-of-balance force: 2.6222e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.8796e+00
norm of the out-of-balance force: 3.2255e-04
norm of the out-of-balance force: 2.4953e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.8187e+00
norm of the out-of-balance force: 3.0661e-04
norm of the out-of-balance force: 2.2780e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
Total running time of the script: (0 minutes 13.860 seconds)