Note
Go to the end to download the full example code
Bending a cantilever beam
Using PatchMesher to model the beam
import math
import sys
import numpy as np
from femedu.examples import Example
from femedu.domain import System, Node
from femedu.solver import NewtonRaphsonSolver
#from femedu.elements.linear import Quad
from femedu.elements.finite import Quad
from femedu.materials import PlaneStress
from femedu.mesher import *
class ExamplePlate11(Example):
def problem(self):
# ========== setting mesh parameters ==============
Nx = 24 # number of elements in the mesh
Ny = 8 # number of elements in the mesh
Lx = 120.0 # length of plate in the x-direction
Ly = 20.0 # length of plate in the y-direction
# ========== setting material parameters ==============
params = dict(
E = 20000., # Young's modulus
nu = 0.250, # Poisson's ratio
t = 1.00 # thickness of the plate
)
# ========== setting load parameters ==============
px = 0.0 # uniform load normal to x=Lx
py = 0.0 # uniform load normal to y=Ly
pxy = 1.5 # uniform shear load on x=L
# ========== setting analysis parameters ==============
target_load_level = 100.00 # reference load
max_steps = 21 # number of load steps: 2 -> [0.0, 1.0]
# target_load_level = 10.00 # reference load
# max_steps = 3 # number of load steps: 2 -> [0.0, 1.0]
# define a list of target load levels
load_levels = np.linspace(0, target_load_level, max_steps)
#
# ==== Build the system model ====
#
model = System()
model.setSolver(NewtonRaphsonSolver())
# create nodes
mesher = PatchMesher(model, (0.,0.),(Lx,0.),(Lx,Ly),(0.,Ly) )
nodes, elements = mesher.quadMesh(Nx, Ny, Quad, PlaneStress(params))
# define support(s)
## find nodes at y==0 and x==0
for node in nodes:
X = node.getPos()
if math.isclose(X[0], 0.0):
node.fixDOF('ux','uy') # fix left side
# ==== complete the reference load ====
Xo = np.array([Lx, 0.0])
No = np.array([1.0, 0.0])
for node in nodes:
X = node.getPos()
if math.isclose(X[0],Lx):
# locate the node at the centerline
if math.isclose(X[1],Ly/2.):
end_node = node
# load the end faces
for elem in node.elements:
for face in elem.faces:
for x, area in zip(face.pos, face.area):
if np.abs( (x - Xo) @ No ) < 1.0e-2 and No @ area / np.linalg.norm(area):
face.setLoad(px, -pxy)
Xo = np.array([0.0, Ly])
No = np.array([0.0, 1.0])
for node in nodes:
X = node.getPos()
if math.isclose(X[1],Ly):
for elem in node.elements:
for face in elem.faces:
for x, area in zip(face.pos, face.area):
if np.abs( (x - Xo) @ No ) < 1.0e-2 and No @ area / np.linalg.norm(area):
face.setLoad(-py, 0.0)
#model.report()
# set up a recorder
model.initRecorder(variables=['ux','uy'], nodes=[end_node])
model.startRecorder()
model.plot(factor=0, title="undeformed system", filename="plate11_undeformed.png", show_bc=1, show_loads=1)
for lf in np.linspace(0.0, target_load_level, max_steps):
model.setLoadFactor(lf)
model.solve(verbose=True)
#model.report()
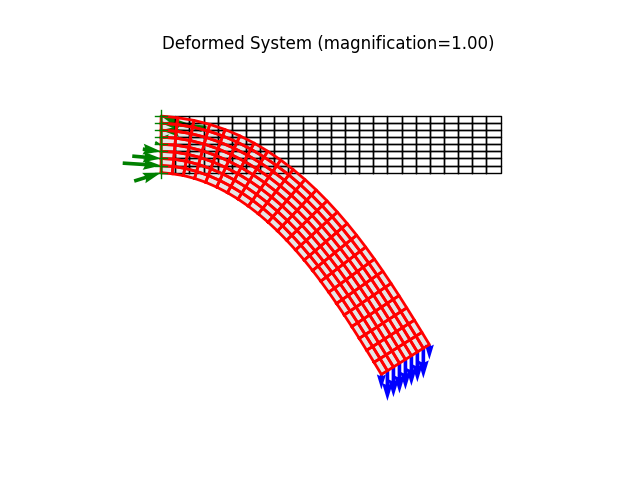
model.plot(factor=1., filename=f"plate11_deformed_lf{lf:.2f}.png", show_bc=1, show_loads=1, show_reactions=1)
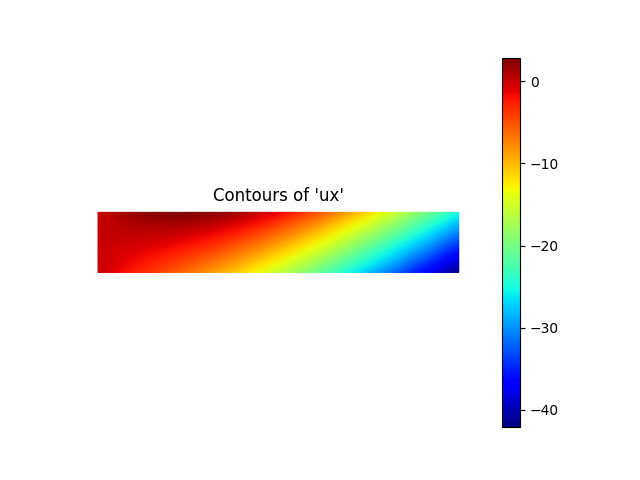
model.valuePlot('ux', filename=f"plate11_ux_lf{lf:.2f}.png")
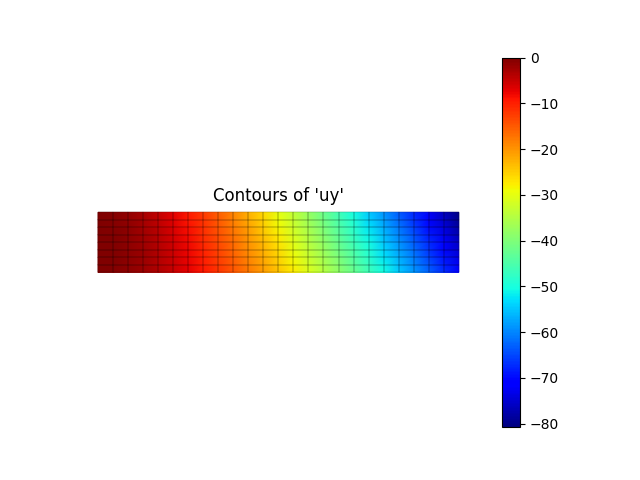
model.valuePlot('uy', show_mesh=True, filename=f"plate11_uy_lf{lf:.2f}.png")
# create a history plot for the end node
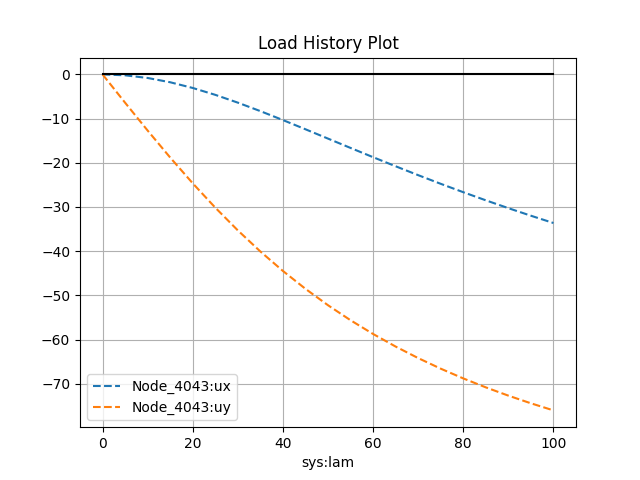
model.historyPlot('lam', ['ux','uy'], nodes=[end_node,end_node])
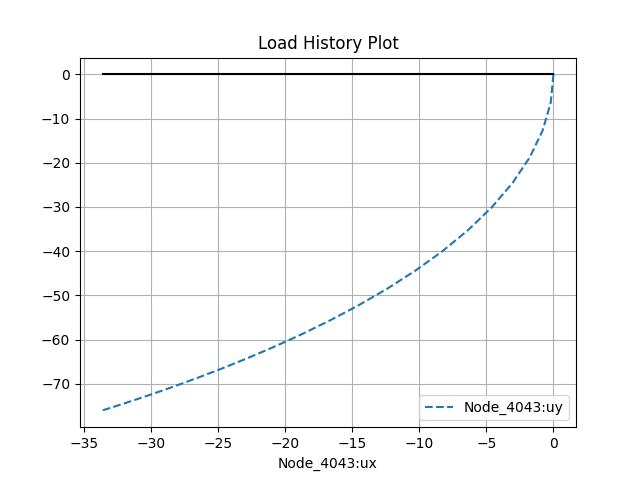
model.historyPlot(('ux',end_node), 'uy', node=end_node)
Run the example by creating an instance of the problem and executing it by calling Example.run()
if __name__ == "__main__":
ex = ExamplePlate11()
ex.run()
norm of the out-of-balance force: 1.2214e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.9467e+03
norm of the out-of-balance force: 7.9605e+00
norm of the out-of-balance force: 2.3934e-04
norm of the out-of-balance force: 3.0140e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.9219e+03
norm of the out-of-balance force: 7.7868e+00
norm of the out-of-balance force: 2.3191e-02
norm of the out-of-balance force: 4.4781e-07
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.8506e+03
norm of the out-of-balance force: 7.2971e+00
norm of the out-of-balance force: 7.4489e-02
norm of the out-of-balance force: 1.2426e-06
norm of the out-of-balance force: 2.5485e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.7413e+03
norm of the out-of-balance force: 6.5823e+00
norm of the out-of-balance force: 1.2884e-01
norm of the out-of-balance force: 1.7002e-06
norm of the out-of-balance force: 2.8543e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.6056e+03
norm of the out-of-balance force: 5.7552e+00
norm of the out-of-balance force: 1.6477e-01
norm of the out-of-balance force: 1.6049e-06
norm of the out-of-balance force: 3.0527e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.4556e+03
norm of the out-of-balance force: 4.9154e+00
norm of the out-of-balance force: 1.7389e-01
norm of the out-of-balance force: 1.1863e-06
norm of the out-of-balance force: 3.0253e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.3020e+03
norm of the out-of-balance force: 4.1306e+00
norm of the out-of-balance force: 1.6004e-01
norm of the out-of-balance force: 7.3543e-07
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.1528e+03
norm of the out-of-balance force: 3.4348e+00
norm of the out-of-balance force: 1.3294e-01
norm of the out-of-balance force: 4.0033e-07
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 1.0133e+03
norm of the out-of-balance force: 2.8379e+00
norm of the out-of-balance force: 1.0211e-01
norm of the out-of-balance force: 1.9726e-07
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 8.8641e+02
norm of the out-of-balance force: 2.3355e+00
norm of the out-of-balance force: 7.3852e-02
norm of the out-of-balance force: 9.0733e-08
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 7.7324e+02
norm of the out-of-balance force: 1.9174e+00
norm of the out-of-balance force: 5.1028e-02
norm of the out-of-balance force: 3.9545e-08
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 6.7371e+02
norm of the out-of-balance force: 1.5719e+00
norm of the out-of-balance force: 3.4075e-02
norm of the out-of-balance force: 1.6925e-08
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 5.8699e+02
norm of the out-of-balance force: 1.2876e+00
norm of the out-of-balance force: 2.2197e-02
norm of the out-of-balance force: 7.5164e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 5.1193e+02
norm of the out-of-balance force: 1.0547e+00
norm of the out-of-balance force: 1.4212e-02
norm of the out-of-balance force: 4.4972e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 4.4719e+02
norm of the out-of-balance force: 8.6434e-01
norm of the out-of-balance force: 8.9976e-03
norm of the out-of-balance force: 4.3767e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 3.9148e+02
norm of the out-of-balance force: 7.0914e-01
norm of the out-of-balance force: 5.6599e-03
norm of the out-of-balance force: 3.7459e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 3.4356e+02
norm of the out-of-balance force: 5.8278e-01
norm of the out-of-balance force: 3.5509e-03
norm of the out-of-balance force: 3.9089e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 3.0233e+02
norm of the out-of-balance force: 4.7996e-01
norm of the out-of-balance force: 2.2284e-03
norm of the out-of-balance force: 3.5516e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 2.6682e+02
norm of the out-of-balance force: 3.9630e-01
norm of the out-of-balance force: 1.4021e-03
norm of the out-of-balance force: 3.7406e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 5.1349e+01
norm of the out-of-balance force: 2.3618e+02
norm of the out-of-balance force: 3.2818e-01
norm of the out-of-balance force: 8.8593e-04
norm of the out-of-balance force: 4.0110e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
Total running time of the script: (0 minutes 52.046 seconds)