Note
Go to the end to download the full example code
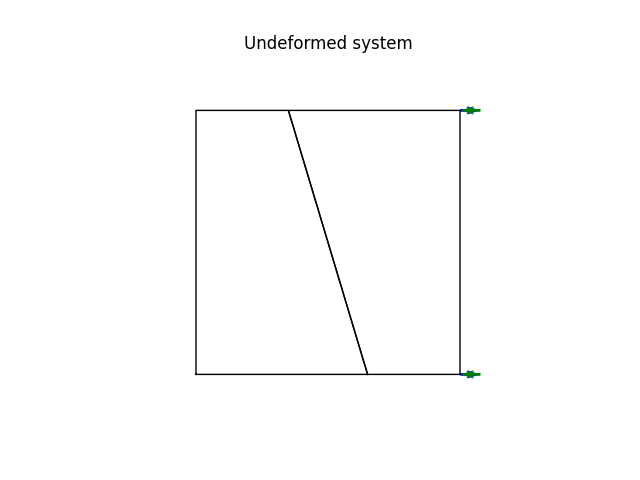
A square patch made of one quadrilateral plate elements
- Basic implementation test with applied loads.
Testing the tangent stiffness computation.
free free
^ ^
| |
3-----2 -> free
| | >
| a | > (w = 1.0)
| | >
0-----1 -> free
width: 10.
height: 10.
Material parameters: St. Venant-Kirchhoff, plane stress
E = 10.0
nu = 0.30
t = 1.0
Element loads:
node 0: [ 0.0, 0.0]
node 1: [ 5.0, 0.0]
node 2: [ 5.0, 0.0]
node 3: [ 0.0, 0.0]
Author: Peter Mackenzie-Helnwein
import numpy as np
from femedu.examples import Example
from femedu.domain import System, Node
from femedu.solver import NewtonRaphsonSolver
from femedu.elements.linear import Quad
from femedu.materials import PlaneStress
class ExamplePlate08(Example):
def problem(self):
params = dict(
E = 10., # Young's modulus
nu = 0.3, # Poisson's ratio
t = 1.0, # thickness of the plate
fy = 1.e30 # yield stress
)
a = 10. # length of the plate in the x-direction
b = 10. # length of the plate in the y-direction
c = 1.5
model = System()
model.setSolver(NewtonRaphsonSolver())
nd0 = Node( 0.0, 0.0)
nd1 = Node(a/2+c,0.0)
nd2 = Node( a, 0.0)
nd3 = Node( 0.0, b)
nd4 = Node( a/2-c, b)
nd5 = Node( a, b)
# nd0.fixDOF('ux', 'uy')
# nd1.fixDOF('uy')
# nd2.fixDOF('uy')
# nd3.fixDOF('ux')
model.addNode(nd0, nd1, nd2, nd3, nd4, nd5)
elemA = Quad(nd0, nd1, nd4, nd3, PlaneStress(params))
elemB = Quad(nd1, nd2, nd5, nd4, PlaneStress(params))
model.addElement(elemA, elemB)
#elemA.setSurfaceLoad(face=3, pn=1.0)
elemB.setSurfaceLoad(face=1, pn=1.0)
model.plot(factor=0.0, title="Undeformed system", filename="plate08_undeformed.png", show_bc=1)
# %%
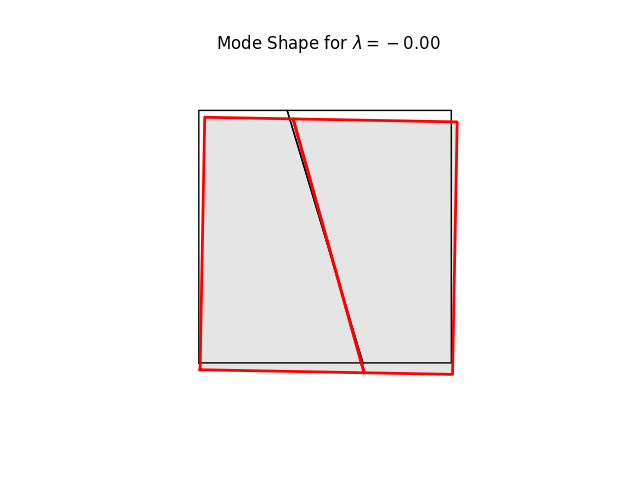
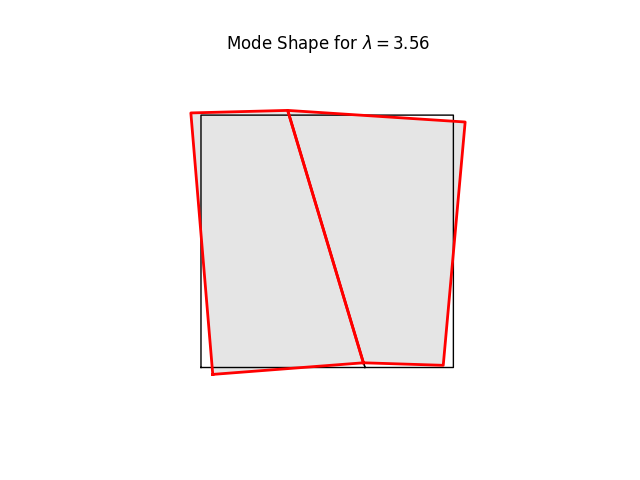
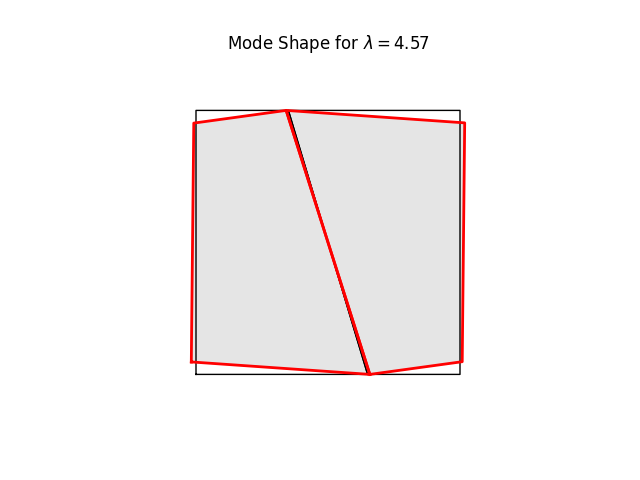
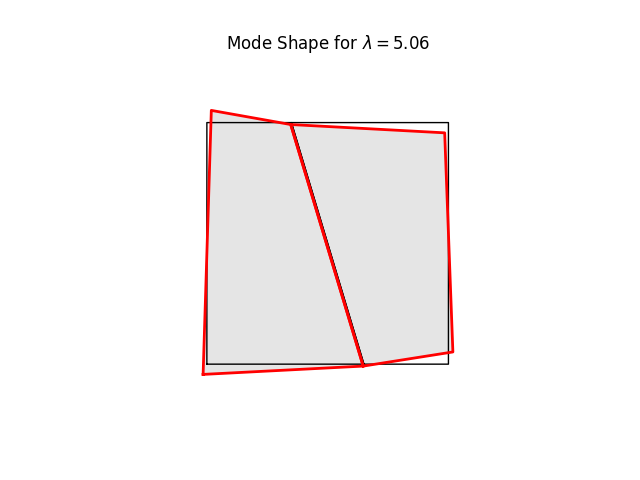
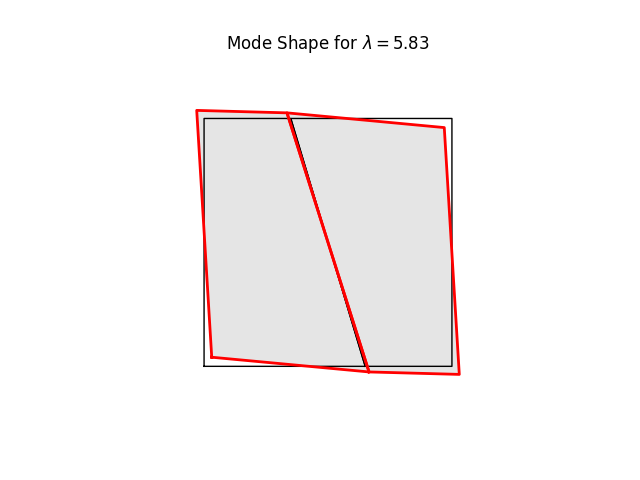
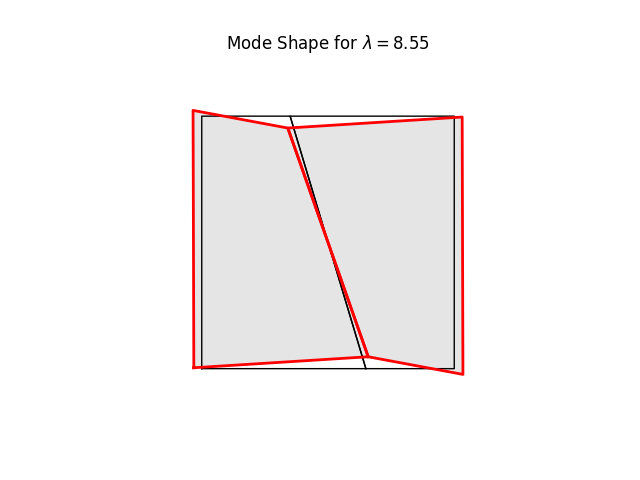
# We can have a quick look at the stiffness mode shapes using the
# buckling-mode plotter. These are simply eigenvalues and eigenvectors of Kt
# at the current load level (0.0)
#
model.setLoadFactor(0.0)
model.solve(tol=1000.)
for k in range(8):
name = f"plate08_mode{k:2d}.png"
model.plotBucklingMode(mode=k,filename=name,factor=1.0)
# %%
# Note the three rigid body modes (lam=0.0). It can be shown that all three
# are limear combinations of translations in x and y-directions and a
# rigid body rotation.
#
# %%
# Now it is time to add boundary conditions, apply loads
# and check the convergence behavior.
#
nd0.fixDOF('ux', 'uy')
nd1.fixDOF('uy')
nd2.fixDOF('uy')
nd3.fixDOF('ux')
model.setLoadFactor(1.0)
model.solve()
# %%
# The output shows that we do have a quadratic rate of convergence.
# %%
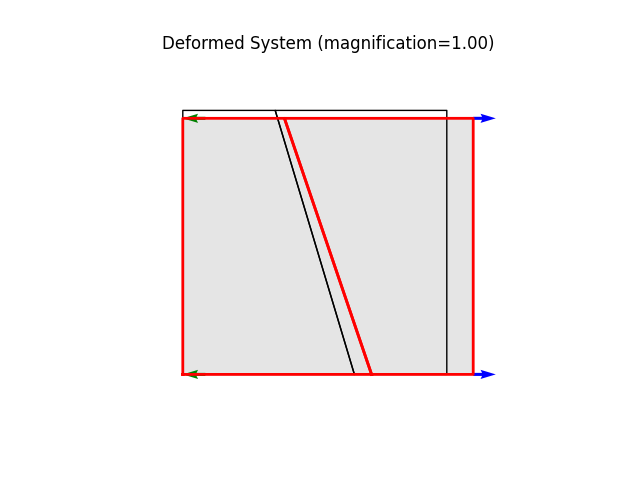
# Let's finish off with a nice plot of the deformed system.
model.plot(factor=1.0, filename="plate08_deformed.png")
#model.report()
Run the example by creating an instance of the problem and executing it by calling Example.run()
if __name__ == "__main__":
ex = ExamplePlate08()
ex.run()
+
+
Total running time of the script: (0 minutes 1.388 seconds)