Note
Go to the end to download the full example code.
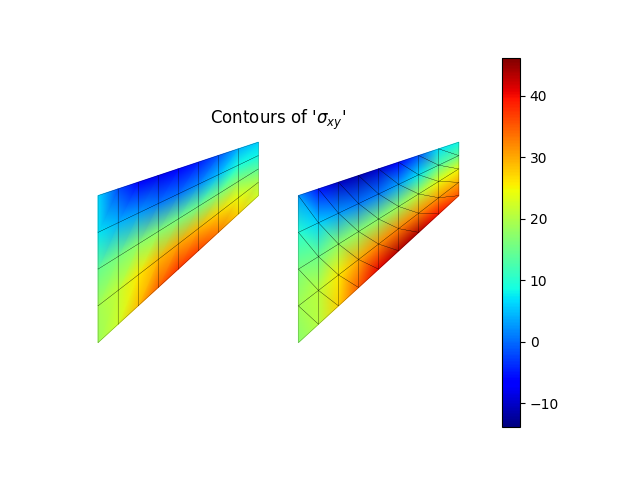
Benchmark problem: Wedged Plate - finite deformations
Features
Using PatchMesher to model the plate
nodal boundary conditions using location-based search
face loads using location-based search
finite deformation Triangle and Quad elements
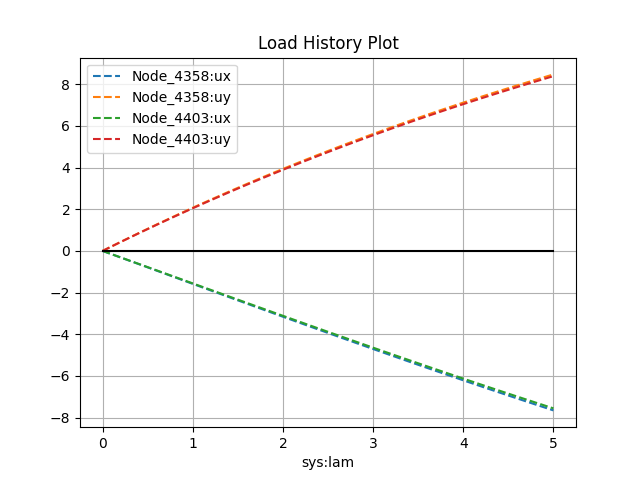
history plot feature
import numpy as np
from femedu.examples import Example
from femedu.domain import System
from femedu.solver import NewtonRaphsonSolver
from femedu.elements.finite import Quad, Triangle
from femedu.materials import PlaneStress
from femedu.mesher import *
class Example20_Benchmark01(Example):
def problem(self):
# ========== setting mesh parameters ==============
Nx = 8 # number of elements in the mesh
Ny = 4 # number of elements in the mesh
# Nx = 16 # number of elements in the mesh
# Ny = 8 # number of elements in the mesh
#
# Nx = 32 # number of elements in the mesh
# Ny = 16 # number of elements in the mesh
L1 = 48.0
L2 = 44.0
L3 = 16.0
# ========== setting material parameters ==============
params = dict(
E = 1000., # Young's modulus
nu = 0.3, # Poisson's ratio
t = 1.00 # thickness of the plate
)
# ========== setting load parameters ==============
px = 0.0 # uniform load normal to x=Lx
pxy = 100.0/L3 # uniform shear load on x=L1
# ========== setting analysis parameters ==============
target_load_level = 5.00 # reference load
max_steps = 26 # number of load steps: 2 -> [0.0, 1.0]
# define a list of target load levels
load_levels = np.linspace(0, target_load_level, max_steps)
#
# ==== Build the system model ====
#
model = System()
model.setSolver(NewtonRaphsonSolver())
# create nodes
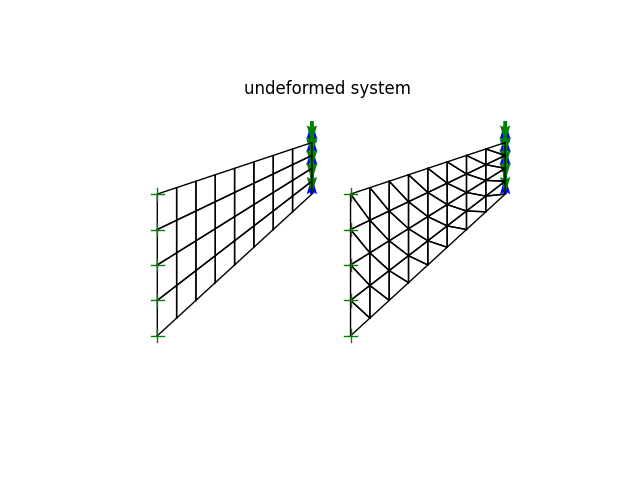
mesher = PatchMesher(model, (0.,0.),(L1, L2),(L1, L2+L3),(0.,L2) )
nodes, elements = mesher.quadMesh(Nx, Ny, Quad, PlaneStress(params))
mesher.shift(1.25*L1, 0.0)
nodes2, elements2 = mesher.triangleMesh(Nx, Ny, Triangle, PlaneStress(params))
nodes += nodes2
elements += elements2
# ==== Apply boundary conditions ====
#
# the left model
#
## fix left side
for node, _ in model.findNodesAlongLine((0.0, 0.0), (0.0, 1.0)):
node.fixDOF('ux', 'uy')
## define loads ...
for _, face in model.findFacesAlongLine((L1,0.0), (0.0,1.0), orientation=+1):
face.setLoad(px, pxy)
## locate the node at the centerline
nodeA, dist = model.findNodesAt((L1, L2+L3))[0]
#
# the right model
#
## fix left side
for node, _ in model.findNodesAlongLine((1.25*L1, 0.0), (0.0, 1.0)):
node.fixDOF('ux', 'uy')
## define loads ...
for _, face in model.findFacesAlongLine((2.25*L1,0.0), (0.0,1.0), orientation=+1):
face.setLoad(px, pxy)
## locate the node at the centerline
nodeB, dist = model.findNodesAt((2.25*L1, L2+L3))[0]
#model.report()
# set up a recorder
model.initRecorder(variables=['ux','uy'], nodes=[nodeA, nodeB])
model.startRecorder()
model.plot(factor=0, title="undeformed system", filename="benchmark01_undeformed.png", show_bc=1, show_loads=1)
for lf in np.linspace(0.0, target_load_level, max_steps):
model.setLoadFactor(lf)
model.solve(verbose=True)
#model.report()
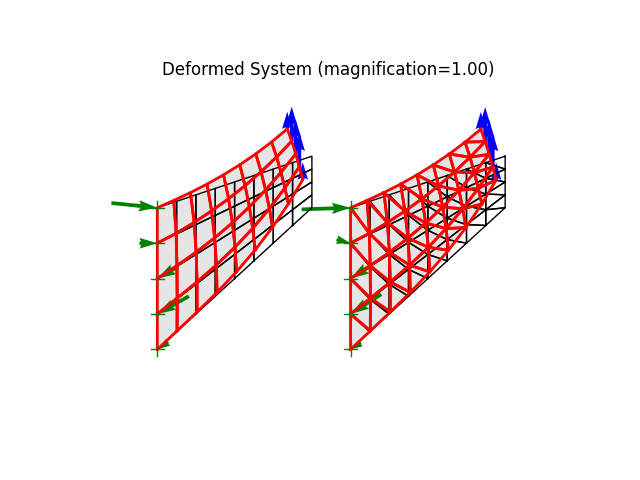
model.plot(factor=1., show_bc=1, show_loads=1, show_reactions=1)
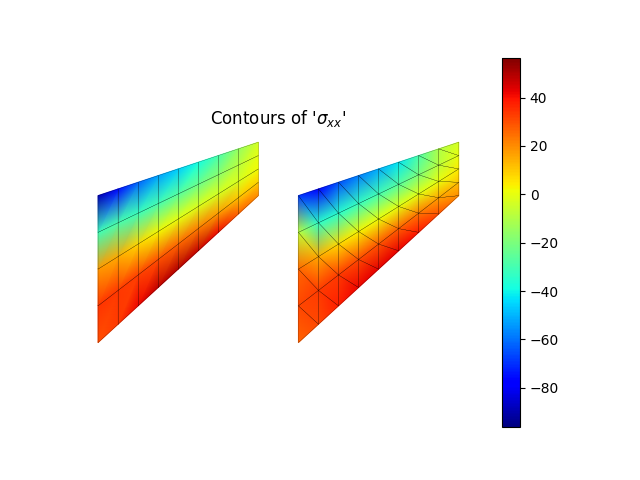
model.valuePlot('sxx', show_mesh=True)
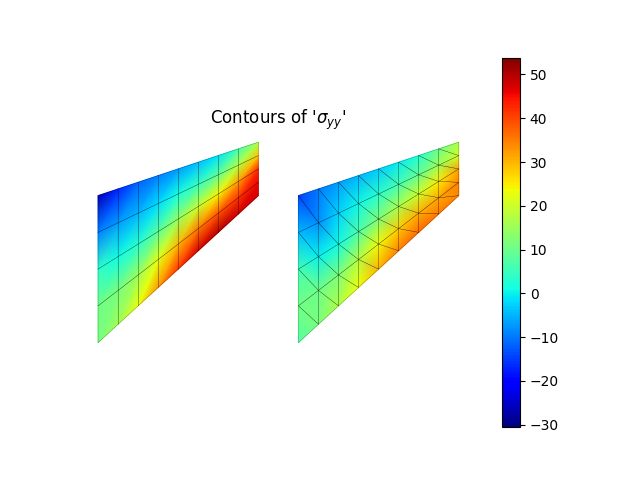
model.valuePlot('syy', show_mesh=True)
model.valuePlot('sxy', show_mesh=True)
# create a history plot for the end node
#model.historyPlot('lam', ['ux','uy'], nodes=[nodeA,nodeA])
#model.historyPlot('lam', ['ux','uy'], nodes=[nodeB,nodeB])
model.historyPlot('lam', ['ux','uy','ux','uy'], nodes=[nodeA,nodeA,nodeB,nodeB])
Run the example by creating an instance of the problem and executing it by calling Example.run()
if __name__ == "__main__":
ex = Example20_Benchmark01()
ex.run()
norm of the out-of-balance force: 2.7908e-11
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.7967e+00
norm of the out-of-balance force: 8.7339e-04
norm of the out-of-balance force: 1.4069e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.6992e+00
norm of the out-of-balance force: 8.4504e-04
norm of the out-of-balance force: 1.3381e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.6018e+00
norm of the out-of-balance force: 8.1663e-04
norm of the out-of-balance force: 1.2956e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.5050e+00
norm of the out-of-balance force: 7.8823e-04
norm of the out-of-balance force: 1.2359e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.4088e+00
norm of the out-of-balance force: 7.5995e-04
norm of the out-of-balance force: 1.1889e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.3136e+00
norm of the out-of-balance force: 7.3186e-04
norm of the out-of-balance force: 1.0970e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.2193e+00
norm of the out-of-balance force: 7.0406e-04
norm of the out-of-balance force: 1.0484e-09
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.1263e+00
norm of the out-of-balance force: 6.7662e-04
norm of the out-of-balance force: 9.5827e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 3.0346e+00
norm of the out-of-balance force: 6.4960e-04
norm of the out-of-balance force: 8.9438e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.9445e+00
norm of the out-of-balance force: 6.2307e-04
norm of the out-of-balance force: 8.4159e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.8559e+00
norm of the out-of-balance force: 5.9709e-04
norm of the out-of-balance force: 7.8098e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.7691e+00
norm of the out-of-balance force: 5.7170e-04
norm of the out-of-balance force: 7.1420e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.6841e+00
norm of the out-of-balance force: 5.4694e-04
norm of the out-of-balance force: 6.7116e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.6009e+00
norm of the out-of-balance force: 5.2286e-04
norm of the out-of-balance force: 6.0705e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.5197e+00
norm of the out-of-balance force: 4.9947e-04
norm of the out-of-balance force: 5.5432e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.4404e+00
norm of the out-of-balance force: 4.7681e-04
norm of the out-of-balance force: 5.1796e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.3631e+00
norm of the out-of-balance force: 4.5488e-04
norm of the out-of-balance force: 4.6150e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.2879e+00
norm of the out-of-balance force: 4.3371e-04
norm of the out-of-balance force: 4.4076e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.2147e+00
norm of the out-of-balance force: 4.1330e-04
norm of the out-of-balance force: 3.8371e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.1436e+00
norm of the out-of-balance force: 3.9364e-04
norm of the out-of-balance force: 3.4770e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.0745e+00
norm of the out-of-balance force: 3.7475e-04
norm of the out-of-balance force: 3.1723e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 2.0075e+00
norm of the out-of-balance force: 3.5661e-04
norm of the out-of-balance force: 2.9706e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.9426e+00
norm of the out-of-balance force: 3.3921e-04
norm of the out-of-balance force: 2.4690e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.8796e+00
norm of the out-of-balance force: 3.2255e-04
norm of the out-of-balance force: 2.3887e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
norm of the out-of-balance force: 1.3229e+01
norm of the out-of-balance force: 1.8187e+00
norm of the out-of-balance force: 3.0661e-04
norm of the out-of-balance force: 2.0858e-10
Recorder.addData: 'stability' not initialized by the recorder: ignored
+
Total running time of the script: (0 minutes 6.546 seconds)